Lab 11: Localization on the real robot
1. Objective
The main goal of this lab is to use Bayes filter to perform localization on my robot.
I will use the optimized version of the localization code to complete the update step.
2. Prelab
First I read all instructions and set up the base code. After I test the bluetooth work well
I start to work on tasks.
3. Tasks
3.1 Test localization in simulation
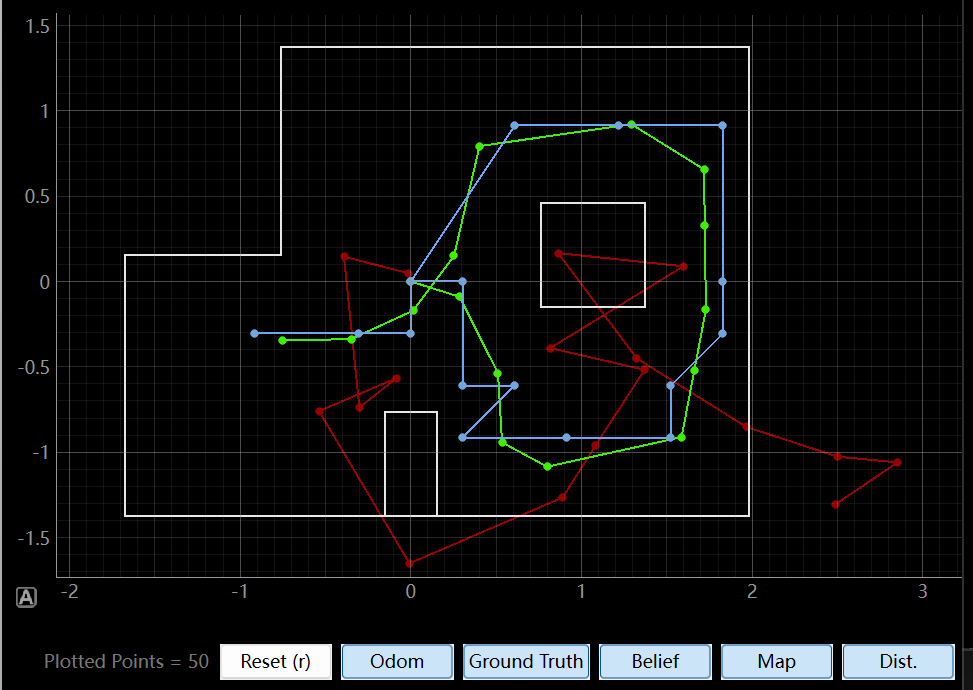
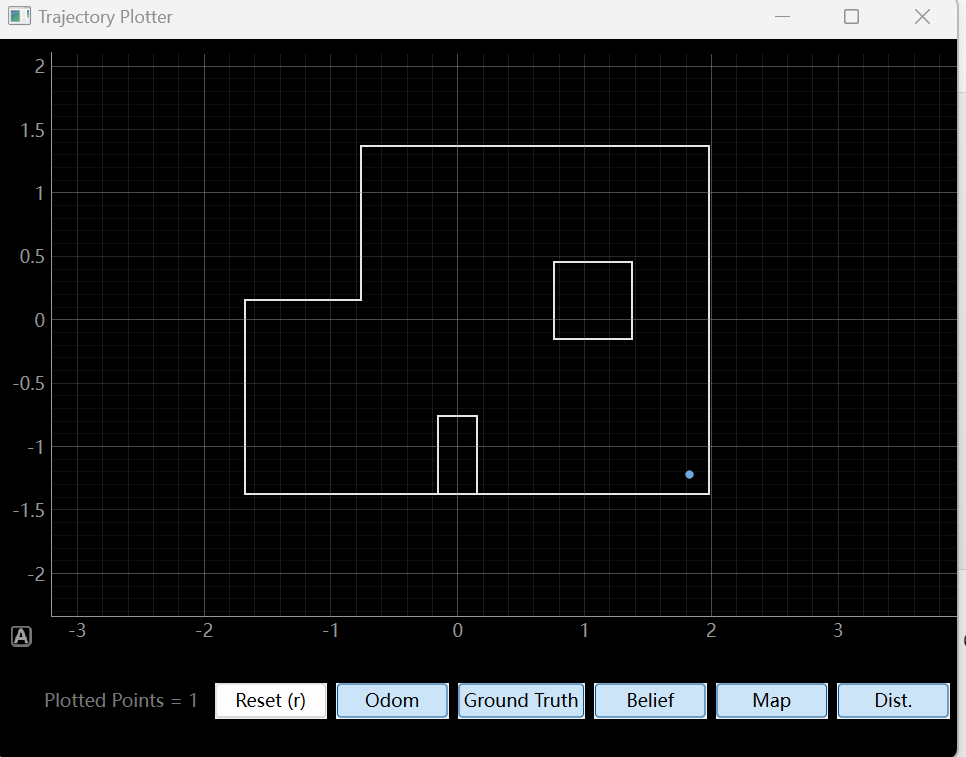
I ran the notebook lab11_sim.ipynb and get the final plot with odom ground truth and belief
on it. Here is the plot
3.2 implement update step to localize the robot
After going through lab11_real.ipynb, I implemented the perform_observation_loop
function of class RealRobot. I mainly used the code in lab 9 (orientation control).
The only thing I changed is the degree increment. In lab 9, the robot turned 25 degree each time
and in lab11 I let it to turn 20 degree for each time. I also created an empty list outside the
perform_observation_loop function. The TOF reading is added to the list for each time. After all results
are stored in the list, the function would return the required form of data which is mentioned in Tips.
Here is the code.
tof1_values = []
def get_notification1(uuid, byte_array):
global message
message = ble.bytearray_to_string(byte_array)
tof1_values.append(float(message)/1000)
import re
import threading
class RealRobot():
"""A class to interact with the real robot
"""
def __init__(self, commander, ble):
# Load world config
self.world_config = os.path.join(str(pathlib.Path(os.getcwd()).parent), "config", "world.yaml")
self.config_params = load_config_params(self.world_config)
# Commander to commuincate with the Plotter process
# Used by the Localization module to plot odom and belief
self.cmdr = commander
# ArtemisBLEController to communicate with the Robot
self.ble = ble
def get_pose(self):
"""Get robot pose based on odometry
Returns:
current_odom -- Odometry Pose (meters, meters, degrees)
"""
raise NotImplementedError("get_pose is not implemented")
def perform_observation_loop(self,rot_vel=120):
'''
ble.stop_notify(ble.uuid['RX_STRING'])
result=[]
filename = 'lab11_test.txt'
ble.start_notify(ble.uuid['RX_STRING'], get_notification)
ble.send_command(CMD.GET_5s_IMU, "2|0.1|1|200|105")
time.sleep(90)
while True:
data = check_file_and_load_data(filename)
if data is not None:
print("data is ready:", data)
result=np.array(data)
break
else:
print("data is not ready")
time.sleep(10) # 每10秒检查一次
'''
ble.start_notify(ble.uuid['RX_STRING'], get_notification1)
ble.send_command(CMD.GET_5s_IMU, "1|0.1|1|200|107")
time.sleep(90)
ble.stop_notify(ble.uuid['RX_STRING'])
print(tof1_values)
bearings=[]
return np.array(tof1_values)[np.newaxis].T,bearings
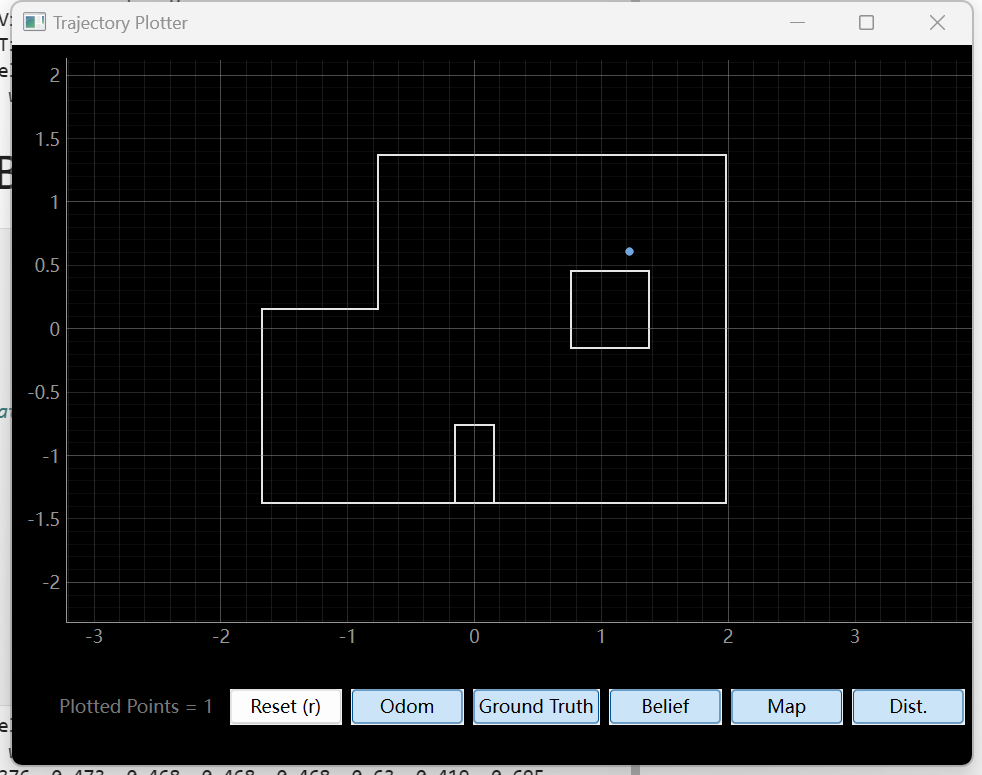
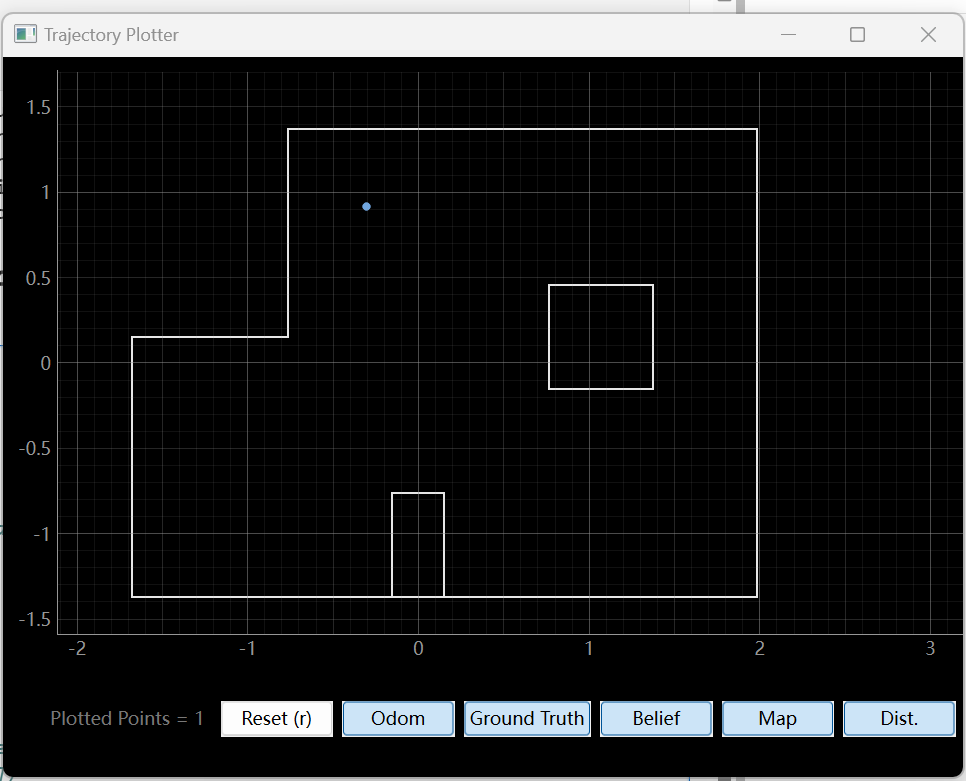
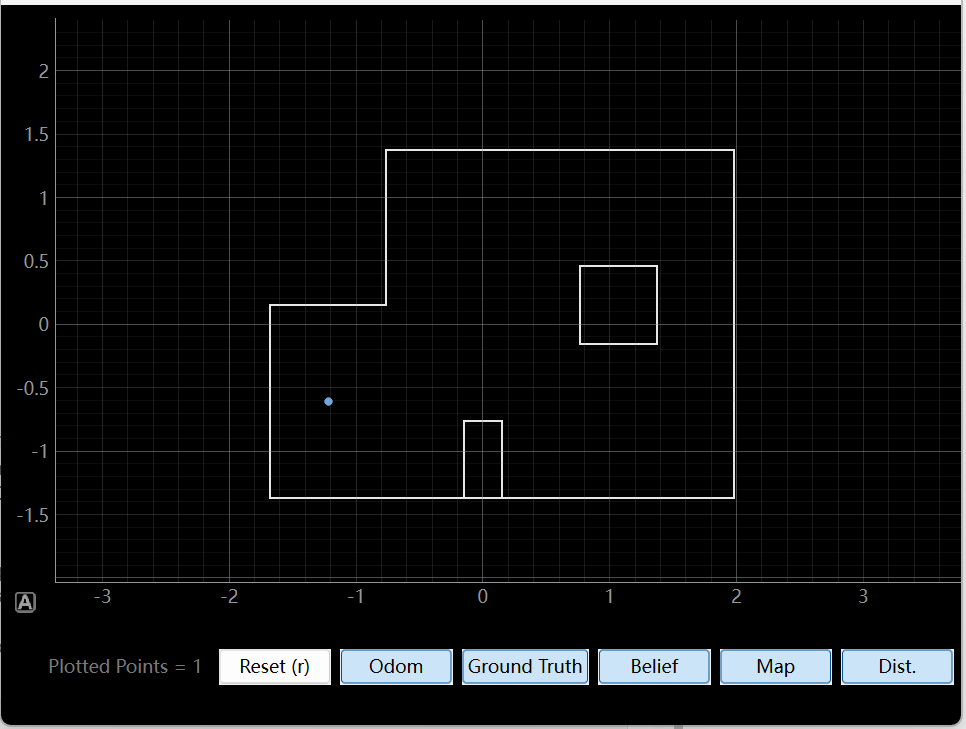
Then, I put the robot in 4 marked poses and run the update step of the Bayes filter.
Here are the plots of the localized poses
The ground truth of these marked poses are: (-3 ft ,-2 ft ,0 deg),
(0 ft,3 ft, 0 deg), (5 ft,-3 ft, 0 deg), (5 ft,3 ft, 0 deg).
Compared to the ground truth, it can be observed
that some poses are accurate while some are not. The reason is that
the robot can not turn 20 degree accurately for each time and the TOF sensor
has some noise. Therefore, it can only return an approximate pose.
Back to the main page