Lab 10: Grid Localization using Bayes Filter
1. Objective
The main goal of this lab is to implement grid localization with Bayes filter and show it works well
2. Lab Tasks
2.1 Code
In order to perform grid localization for the sample trajectory, I read all instructions and tips and write the code to implement the five functions: compute_control, odom_motion_model, prediction_step, sensor_model, update_step. I change the input and output form of sensor_model. Here is the code.
# In the docstring, "pose" refers to a numpy array with elements (x,y,yaw) in (meters, meters, degrees)
import math
import numpy as np
def compute_control(cur_pose, prev_pose):
""" Given the current and previous odometry poses, this function extracts
the control information based on the odometry motion model.
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
Returns:
[delta_rot_1]: Rotation 1 (degrees)
[delta_trans]: Translation (meters)
[delta_rot_2]: Rotation 2 (degrees)
"""
rot_mid = math.degrees(math.atan2(cur_pose[1]-prev_pose[1],cur_pose[0]-prev_pose[0]))
delta_rot_1 = rot_mid-prev_pose[2]
delta_trans = np.sqrt(np.square(cur_pose[1]-prev_pose[1])+np.square(cur_pose[0]-prev_pose[0]))
delta_rot_2 = cur_pose[2]-rot_mid
delta_rot_1=loc.mapper.normalize_angle(delta_rot_1)
delta_rot_2=loc.mapper.normalize_angle(delta_rot_2)
return delta_rot_1, delta_trans, delta_rot_2
def odom_motion_model(cur_pose, prev_pose, u):
""" Odometry Motion Model
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
(rot1, trans, rot2) (float, float, float): A tuple with control data in the format
format (rot1, trans, rot2) with units (degrees, meters, degrees)
Returns:
prob [float]: Probability p(x'|x, u)
"""
delta_rot1, delta_trans, delta_rot2 = compute_control(cur_pose, prev_pose)
actual_delta_rot1, actual_delta_trans, actual_delta_rot2 = u
p1 = loc.gaussian(delta_rot1,actual_delta_rot1,loc.odom_rot_sigma)
p2 = loc.gaussian(delta_trans,actual_delta_trans,loc.odom_trans_sigma)
p3 = loc.gaussian(delta_rot2,actual_delta_rot2,loc.odom_rot_sigma)
prob=p1*p2*p3
return prob
def prediction_step(cur_odom, prev_odom):
""" Prediction step of the Bayes Filter.
Update the probabilities in loc.bel_bar based on loc.bel from the previous time step and the odometry motion model.
Args:
cur_odom ([Pose]): Current Pose
prev_odom ([Pose]): Previous Pose
"""
actual_u=compute_control(cur_odom, prev_odom)
for x_pre in range(loc.mapper.MAX_CELLS_X):
for y_pre in range(loc.mapper.MAX_CELLS_Y):
for a_pre in range(loc.mapper.MAX_CELLS_A):
# if the probability is very small, skip it
if loc.bel[x_pre,y_pre,a_pre]<0.0001:
continue
else:
for x in range(loc.mapper.MAX_CELLS_X):
for y in range(loc.mapper.MAX_CELLS_Y):
for a in range(loc.mapper.MAX_CELLS_A):
prob=odom_motion_model(loc.mapper.from_map(x, y, a), loc.mapper.from_map(x_pre,y_pre,a_pre), actual_u)
loc.bel_bar[x,y,a] += prob * loc.bel[x_pre,y_pre,a_pre]
# do the normalization
bel_bar_total=np.sum(loc.bel_bar)
if bel_bar_total > 0:
loc.bel_bar /= bel_bar_total
def sensor_model(obs,curr_state):
""" This is the equivalent of p(z|x).
Args:
obs ([ndarray]): A 1D array consisting of the true observations for a specific robot pose in the map
Returns:
[ndarray]: Returns the likelihood of 18 measurements
"""
prob_array=[]
for i in range(loc.mapper.OBS_PER_CELL):
prob=loc.gaussian(obs[i],curr_state[i],loc.sensor_sigma)
prob_array.append(prob)
prob_array=np.array(prob_array)
total_prob = np.prod(prob_array)
return total_prob
def update_step():
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
"""
for x in range(loc.mapper.MAX_CELLS_X):
for y in range(loc.mapper.MAX_CELLS_Y):
for a in range(loc.mapper.MAX_CELLS_A):
loc.bel[x,y,a]=sensor_model(loc.obs_range_data,loc.mapper.get_views(x,y,a))*loc.bel_bar[x,y,a]
loc_bel_sum = np.sum(loc.bel)
loc.bel=loc.bel/loc_bel_sum
2.2 Result
The output of initialize a uniform probability distribution and perform the update step of the Bayes Filter to localize the robot is:
2024-04-22 17:03:35,844 | INFO |: Initializing beliefs with a Uniform Distribution
2024-04-22 17:03:35,845 | INFO |: Uniform Belief with each cell value: 0.00051440329218107
2024-04-22 17:03:38,955 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:03:38,962 | INFO |: GT index : (6, 4, 9)
2024-04-22 17:03:38,963 | INFO |: Bel index : (5, 3, 9) with prob = 0.9973627
2024-04-22 17:03:38,964 | INFO |: Bel_bar prob at index = 0.00051440329218107
2024-04-22 17:03:38,965 | INFO |: GT : (0.000, 0.000, 360.000)
2024-04-22 17:03:38,967 | INFO |: Belief : (0.000, -0.305, 10.000)
2024-04-22 17:03:38,968 | INFO |: POS ERROR : (-0.000, 0.305, 350.000)
2024-04-22 17:03:38,970 | INFO |: ---------- UPDATE STATS -----------
----------------- 0 -----------------
2024-04-22 17:04:55,904 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:04:55,920 | INFO |: GT index : (6, 3, 6)
2024-04-22 17:04:55,921 | INFO |: Prior Bel index : (6, 5, 10) with prob = 0.1158881
2024-04-22 17:04:55,922 | INFO |: POS ERROR : (-0.018, -0.393, -70.107)
2024-04-22 17:04:55,922 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:04:59,037 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:04:59,047 | INFO |: GT index : (6, 3, 6)
2024-04-22 17:04:59,048 | INFO |: Bel index : (6, 4, 6) with prob = 1.0
2024-04-22 17:04:59,050 | INFO |: Bel_bar prob at index = 0.00011300574683638963
2024-04-22 17:04:59,050 | INFO |: GT : (0.287, -0.089, 319.893)
2024-04-22 17:04:59,051 | INFO |: Belief : (0.305, 0.000, -50.000)
2024-04-22 17:04:59,052 | INFO |: POS ERROR : (-0.018, -0.089, 369.893)
2024-04-22 17:04:59,054 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 1 -----------------
2024-04-22 17:05:01,120 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:01,135 | INFO |: GT index : (7, 2, 5)
2024-04-22 17:05:01,136 | INFO |: Prior Bel index : (6, 2, 5) with prob = 0.0826062
2024-04-22 17:05:01,137 | INFO |: POS ERROR : (0.197, 0.098, 366.975)
2024-04-22 17:05:01,138 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:04,270 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:04,272 | INFO |: GT index : (7, 2, 5)
2024-04-22 17:05:04,273 | INFO |: Bel index : (6, 2, 5) with prob = 1.0
2024-04-22 17:05:04,274 | INFO |: Bel_bar prob at index = 0.08260622566610608
2024-04-22 17:05:04,275 | INFO |: GT : (0.510, -0.527, 656.975)
2024-04-22 17:05:04,275 | INFO |: Belief : (0.305, -0.610, -70.000)
2024-04-22 17:05:04,276 | INFO |: POS ERROR : (0.205, 0.083, 726.975)
2024-04-22 17:05:04,276 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 2 -----------------
2024-04-22 17:05:05,328 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:05,344 | INFO |: GT index : (7, 2, 4)
2024-04-22 17:05:05,346 | INFO |: Prior Bel index : (5, 2, 3) with prob = 0.1606788
2024-04-22 17:05:05,346 | INFO |: POS ERROR : (0.510, 0.083, 744.437)
2024-04-22 17:05:05,347 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:08,479 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:08,485 | INFO |: GT index : (7, 2, 4)
2024-04-22 17:05:08,486 | INFO |: Bel index : (6, 2, 4) with prob = 1.0
2024-04-22 17:05:08,486 | INFO |: Bel_bar prob at index = 0.011468687038371556
2024-04-22 17:05:08,487 | INFO |: GT : (0.510, -0.527, 994.437)
2024-04-22 17:05:08,489 | INFO |: Belief : (0.305, -0.610, -90.000)
2024-04-22 17:05:08,490 | INFO |: POS ERROR : (0.205, 0.083, 1084.437)
2024-04-22 17:05:08,491 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 3 -----------------
2024-04-22 17:05:09,550 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:09,565 | INFO |: GT index : (7, 0, 4)
2024-04-22 17:05:09,566 | INFO |: Prior Bel index : (6, 0, 3) with prob = 0.1440685
2024-04-22 17:05:09,566 | INFO |: POS ERROR : (0.236, 0.294, 1104.437)
2024-04-22 17:05:09,567 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:12,672 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:12,675 | INFO |: GT index : (7, 0, 4)
2024-04-22 17:05:12,676 | INFO |: Bel index : (7, 1, 4) with prob = 1.0
2024-04-22 17:05:12,676 | INFO |: Bel_bar prob at index = 9.376543355288425e-05
2024-04-22 17:05:12,678 | INFO |: GT : (0.541, -0.926, 1354.437)
2024-04-22 17:05:12,679 | INFO |: Belief : (0.610, -0.914, -90.000)
2024-04-22 17:05:12,680 | INFO |: POS ERROR : (-0.069, -0.011, 1444.437)
2024-04-22 17:05:12,680 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 4 -----------------
2024-04-22 17:05:15,769 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:15,782 | INFO |: GT index : (8, 0, 9)
2024-04-22 17:05:15,785 | INFO |: Prior Bel index : (9, 1, 7) with prob = 0.0739270
2024-04-22 17:05:15,787 | INFO |: POS ERROR : (-0.417, -0.147, 1471.334)
2024-04-22 17:05:15,789 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:18,910 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:18,919 | INFO |: GT index : (8, 0, 9)
2024-04-22 17:05:18,920 | INFO |: Bel index : (8, 1, 9) with prob = 1.0
2024-04-22 17:05:18,921 | INFO |: Bel_bar prob at index = 0.0002967758010305253
2024-04-22 17:05:18,922 | INFO |: GT : (0.803, -1.061, 1801.334)
2024-04-22 17:05:18,922 | INFO |: Belief : (0.914, -0.914, 10.000)
2024-04-22 17:05:18,923 | INFO |: POS ERROR : (-0.112, -0.147, 1791.334)
2024-04-22 17:05:18,924 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 5 -----------------
2024-04-22 17:05:25,011 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:25,025 | INFO |: GT index : (11, 1, 11)
2024-04-22 17:05:25,026 | INFO |: Prior Bel index : (8, 0, 7) with prob = 0.2798443
2024-04-22 17:05:25,027 | INFO |: POS ERROR : (0.668, 0.335, 1880.301)
2024-04-22 17:05:25,028 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:28,116 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:28,117 | INFO |: GT index : (11, 1, 11)
2024-04-22 17:05:28,118 | INFO |: Bel index : (10, 1, 11) with prob = 1.0
2024-04-22 17:05:28,119 | INFO |: Bel_bar prob at index = 1.3474373381724962e-08
2024-04-22 17:05:28,119 | INFO |: GT : (1.583, -0.884, 2210.301)
2024-04-22 17:05:28,121 | INFO |: Belief : (1.524, -0.914, 50.000)
2024-04-22 17:05:28,122 | INFO |: POS ERROR : (0.059, 0.031, 2160.301)
2024-04-22 17:05:28,124 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 6 -----------------
2024-04-22 17:05:30,194 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:30,208 | INFO |: GT index : (11, 2, 12)
2024-04-22 17:05:30,209 | INFO |: Prior Bel index : (10, 3, 13) with prob = 0.0790988
2024-04-22 17:05:30,210 | INFO |: POS ERROR : (0.133, -0.200, 2148.955)
2024-04-22 17:05:30,211 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:33,317 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:33,331 | INFO |: GT index : (11, 2, 12)
2024-04-22 17:05:33,332 | INFO |: Bel index : (11, 3, 13) with prob = 1.0
2024-04-22 17:05:33,334 | INFO |: Bel_bar prob at index = 0.001426833726858487
2024-04-22 17:05:33,334 | INFO |: GT : (1.659, -0.491, 2598.955)
2024-04-22 17:05:33,335 | INFO |: Belief : (1.829, -0.305, 90.000)
2024-04-22 17:05:33,336 | INFO |: POS ERROR : (-0.169, -0.186, 2508.955)
2024-04-22 17:05:33,337 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 7 -----------------
2024-04-22 17:05:35,411 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:35,423 | INFO |: GT index : (11, 3, 13)
2024-04-22 17:05:35,425 | INFO |: Prior Bel index : (11, 5, 16) with prob = 0.0605929
2024-04-22 17:05:35,425 | INFO |: POS ERROR : (-0.099, -0.437, 2454.495)
2024-04-22 17:05:35,428 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:38,519 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:38,526 | INFO |: GT index : (11, 3, 13)
2024-04-22 17:05:38,527 | INFO |: Bel index : (11, 3, 13) with prob = 1.0
2024-04-22 17:05:38,528 | INFO |: Bel_bar prob at index = 0.0008273893744065211
2024-04-22 17:05:38,529 | INFO |: GT : (1.730, -0.132, 2964.590)
2024-04-22 17:05:38,530 | INFO |: Belief : (1.829, -0.305, 90.000)
2024-04-22 17:05:38,531 | INFO |: POS ERROR : (-0.099, 0.173, 2874.590)
2024-04-22 17:05:38,532 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 8 -----------------
2024-04-22 17:05:41,621 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:41,637 | INFO |: GT index : (11, 5, 14)
2024-04-22 17:05:41,638 | INFO |: Prior Bel index : (11, 6, 13) with prob = 0.0824727
2024-04-22 17:05:41,640 | INFO |: POS ERROR : (-0.102, -0.250, 2897.800)
2024-04-22 17:05:41,641 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:44,763 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:44,781 | INFO |: GT index : (11, 5, 14)
2024-04-22 17:05:44,783 | INFO |: Bel index : (11, 4, 13) with prob = 0.8884502
2024-04-22 17:05:44,783 | INFO |: Bel_bar prob at index = 0.030911786371736173
2024-04-22 17:05:44,785 | INFO |: GT : (1.727, 0.360, 3347.800)
2024-04-22 17:05:44,787 | INFO |: Belief : (1.829, 0.000, 90.000)
2024-04-22 17:05:44,788 | INFO |: POS ERROR : (-0.102, 0.360, 3257.800)
2024-04-22 17:05:44,788 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 9 -----------------
2024-04-22 17:05:47,894 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:47,906 | INFO |: GT index : (11, 6, 16)
2024-04-22 17:05:47,907 | INFO |: Prior Bel index : (10, 6, 13) with prob = 0.1023932
2024-04-22 17:05:47,908 | INFO |: POS ERROR : (0.201, 0.075, 3298.571)
2024-04-22 17:05:47,909 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:50,995 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:51,001 | INFO |: GT index : (11, 6, 16)
2024-04-22 17:05:51,002 | INFO |: Bel index : (11, 7, 16) with prob = 1.0
2024-04-22 17:05:51,003 | INFO |: Bel_bar prob at index = 0.0030344813734931404
2024-04-22 17:05:51,004 | INFO |: GT : (1.725, 0.684, 3748.571)
2024-04-22 17:05:51,005 | INFO |: Belief : (1.829, 0.914, 150.000)
2024-04-22 17:05:51,005 | INFO |: POS ERROR : (-0.104, -0.230, 3598.571)
2024-04-22 17:05:51,006 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 10 -----------------
2024-04-22 17:05:53,114 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:53,118 | INFO |: GT index : (10, 7, 16)
2024-04-22 17:05:53,119 | INFO |: Prior Bel index : (9, 6, 16) with prob = 0.0984926
2024-04-22 17:05:53,120 | INFO |: POS ERROR : (0.079, 0.335, 3609.841)
2024-04-22 17:05:53,121 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:56,247 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:05:56,263 | INFO |: GT index : (10, 7, 17)
2024-04-22 17:05:56,265 | INFO |: Bel index : (10, 7, 16) with prob = 0.9998043
2024-04-22 17:05:56,265 | INFO |: Bel_bar prob at index = 0.015646578767092058
2024-04-22 17:05:56,267 | INFO |: GT : (1.298, 0.945, 4120.033)
2024-04-22 17:05:56,269 | INFO |: Belief : (1.524, 0.914, 150.000)
2024-04-22 17:05:56,270 | INFO |: POS ERROR : (-0.226, 0.030, 3970.033)
2024-04-22 17:05:56,271 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 11 -----------------
2024-04-22 17:05:59,369 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:05:59,374 | INFO |: GT index : (7, 6, 3)
2024-04-22 17:05:59,375 | INFO |: Prior Bel index : (6, 8, 2) with prob = 0.0885458
2024-04-22 17:05:59,376 | INFO |: POS ERROR : (0.104, -0.410, 4347.417)
2024-04-22 17:05:59,378 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:02,482 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:06:02,490 | INFO |: GT index : (7, 6, 3)
2024-04-22 17:06:02,491 | INFO |: Bel index : (7, 7, 3) with prob = 0.9999999
2024-04-22 17:06:02,492 | INFO |: Bel_bar prob at index = 0.02650825413413902
2024-04-22 17:06:02,493 | INFO |: GT : (0.409, 0.809, 4577.417)
2024-04-22 17:06:02,494 | INFO |: Belief : (0.610, 0.914, -110.000)
2024-04-22 17:06:02,495 | INFO |: POS ERROR : (-0.201, -0.105, 4687.417)
2024-04-22 17:06:02,496 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 12 -----------------
2024-04-22 17:06:04,580 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:04,591 | INFO |: GT index : (6, 4, 6)
2024-04-22 17:06:04,592 | INFO |: Prior Bel index : (7, 6, 6) with prob = 0.1171219
2024-04-22 17:06:04,593 | INFO |: POS ERROR : (-0.343, -0.435, 4674.028)
2024-04-22 17:06:04,595 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:07,716 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:06:07,729 | INFO |: GT index : (6, 4, 6)
2024-04-22 17:06:07,730 | INFO |: Bel index : (6, 4, 6) with prob = 1.0
2024-04-22 17:06:07,731 | INFO |: Bel_bar prob at index = 0.01895167153682893
2024-04-22 17:06:07,732 | INFO |: GT : (0.267, 0.175, 4984.028)
2024-04-22 17:06:07,733 | INFO |: Belief : (0.305, 0.000, -50.000)
2024-04-22 17:06:07,734 | INFO |: POS ERROR : (-0.038, 0.175, 5034.028)
2024-04-22 17:06:07,735 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 13 -----------------
2024-04-22 17:06:09,795 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:09,810 | INFO |: GT index : (6, 3, 2)
2024-04-22 17:06:09,811 | INFO |: Prior Bel index : (7, 2, 2) with prob = 0.1058974
2024-04-22 17:06:09,812 | INFO |: POS ERROR : (-0.570, 0.456, 5045.284)
2024-04-22 17:06:09,814 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:12,940 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:06:12,956 | INFO |: GT index : (6, 3, 2)
2024-04-22 17:06:12,957 | INFO |: Bel index : (5, 3, 2) with prob = 1.0
2024-04-22 17:06:12,959 | INFO |: Bel_bar prob at index = 1.3164516707296048e-06
2024-04-22 17:06:12,959 | INFO |: GT : (0.039, -0.154, 5275.284)
2024-04-22 17:06:12,960 | INFO |: Belief : (0.000, -0.305, -130.000)
2024-04-22 17:06:12,961 | INFO |: POS ERROR : (0.039, 0.151, 5405.284)
2024-04-22 17:06:12,962 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 14 -----------------
2024-04-22 17:06:16,055 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:16,066 | INFO |: GT index : (4, 2, 1)
2024-04-22 17:06:16,067 | INFO |: Prior Bel index : (4, 4, 0) with prob = 0.1342123
2024-04-22 17:06:16,068 | INFO |: POS ERROR : (-0.013, -0.333, 5422.457)
2024-04-22 17:06:16,069 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:19,187 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:06:19,201 | INFO |: GT index : (4, 2, 1)
2024-04-22 17:06:19,202 | INFO |: Bel index : (4, 3, 1) with prob = 1.0
2024-04-22 17:06:19,203 | INFO |: Bel_bar prob at index = 0.002228268174503864
2024-04-22 17:06:19,203 | INFO |: GT : (-0.318, -0.333, 5612.457)
2024-04-22 17:06:19,204 | INFO |: Belief : (-0.305, -0.305, -150.000)
2024-04-22 17:06:19,205 | INFO |: POS ERROR : (-0.013, -0.029, 5762.457)
2024-04-22 17:06:19,206 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
----------------- 15 -----------------
2024-04-22 17:06:22,299 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:22,315 | INFO |: GT index : (3, 2, 0)
2024-04-22 17:06:22,315 | INFO |: Prior Bel index : (5, 4, 0) with prob = 0.1396886
2024-04-22 17:06:22,318 | INFO |: POS ERROR : (-0.718, -0.357, 5759.056)
2024-04-22 17:06:22,319 | INFO |: ---------- PREDICTION STATS -----------
2024-04-22 17:06:25,420 | INFO |: ---------- UPDATE STATS -----------
2024-04-22 17:06:25,426 | INFO |: GT index : (3, 2, 0)
2024-04-22 17:06:25,427 | INFO |: Bel index : (3, 3, 0) with prob = 0.9999828
2024-04-22 17:06:25,427 | INFO |: Bel_bar prob at index = 2.217016915872908e-05
2024-04-22 17:06:25,428 | INFO |: GT : (-0.718, -0.357, 5949.152)
2024-04-22 17:06:25,428 | INFO |: Belief : (-0.610, -0.305, -170.000)
2024-04-22 17:06:25,429 | INFO |: POS ERROR : (-0.108, -0.052, 6119.152)
2024-04-22 17:06:25,430 | INFO |: ---------- UPDATE STATS -----------
-------------------------------------
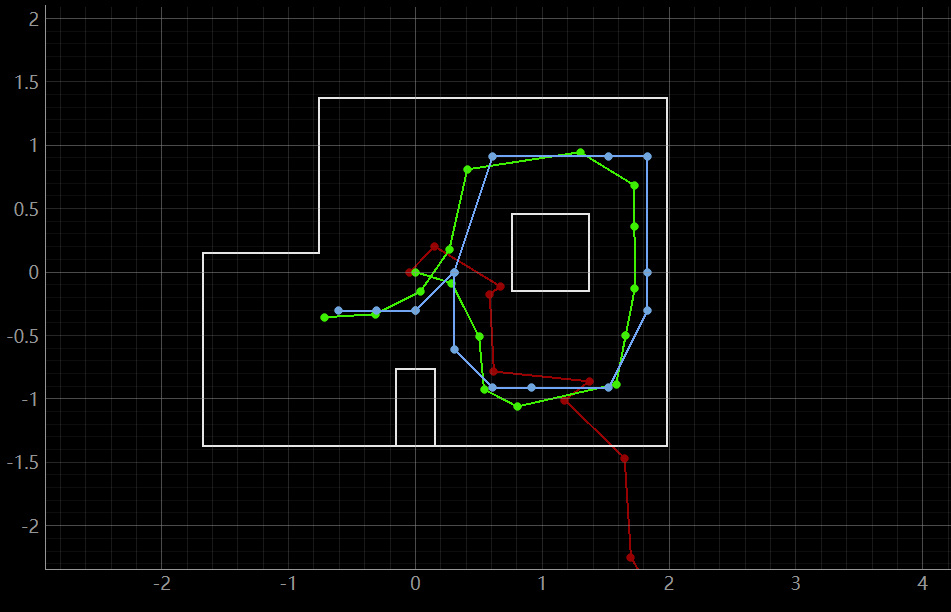
The trajectory of odometry(red), ground truth(green) and belief(blue) is shown below:
Here is a video of the best localization results
From the result above, it shows the bayes filter works all the time compared to the non-probalistic methods. The prediction step can predict the position based on the priori estimation and robot motion model.Then, it updates using both prediction and measurement. The result is quite similar to the ground truth.
Back to the main page